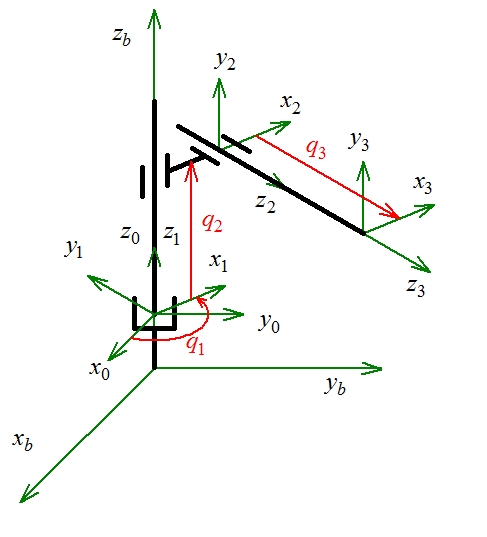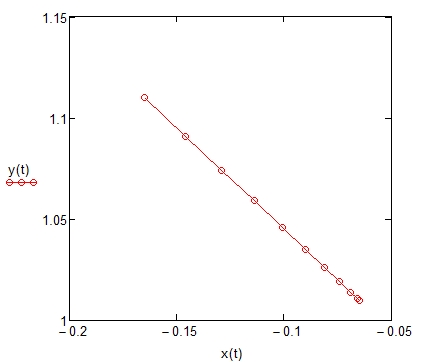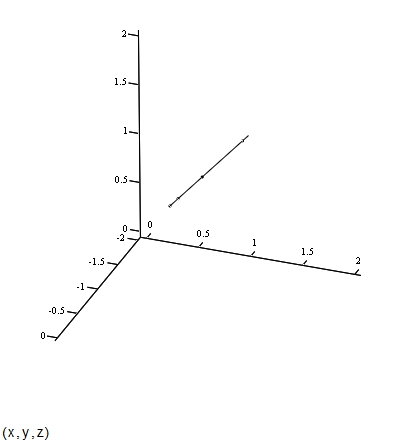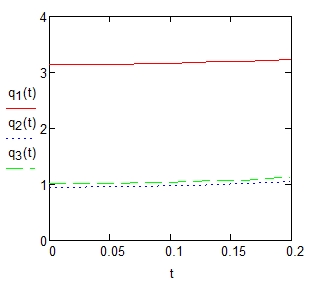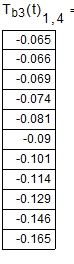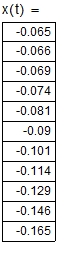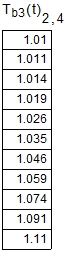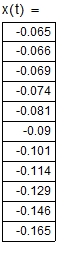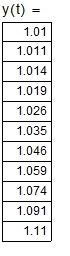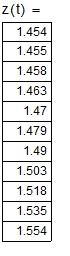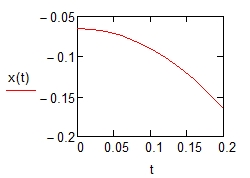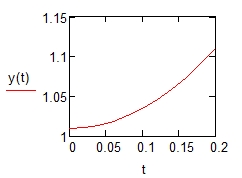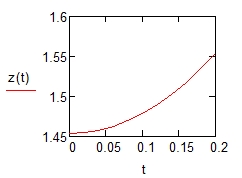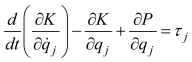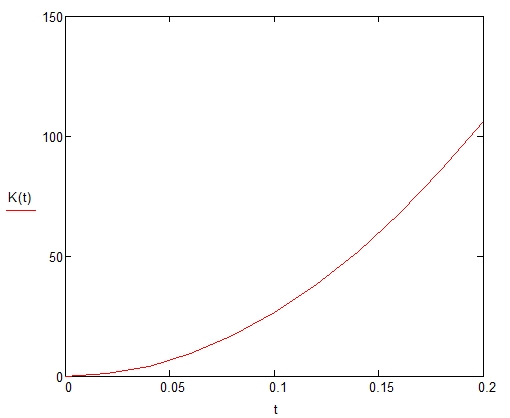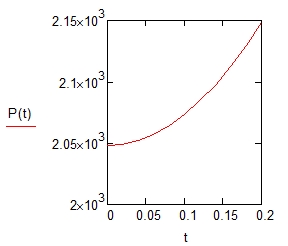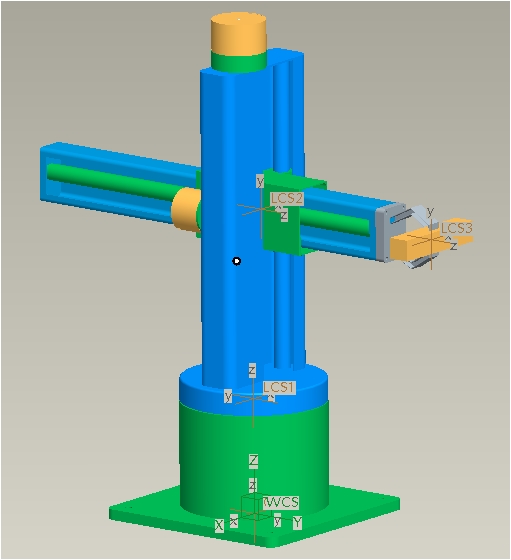
Rovnice pohybu počátku LCS3 - rovnoměrně zrychlený pohyb, trajektorii je vhodné řešit po částech s použitím počáteční polohy a rychlosti z koncových hodnot předchozího segmentu trajektorie
Výchozí hodnota kloubových proměnných odpovídající výchozí poloze konc.bodu nutná pro řešič inverzní úlohy (Given, Find)
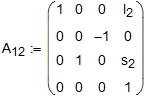
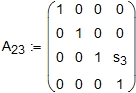
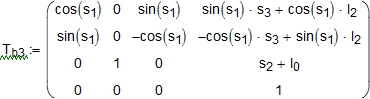
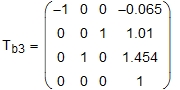
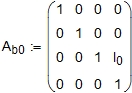
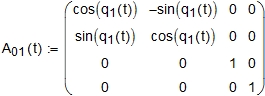
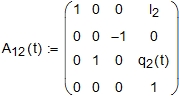
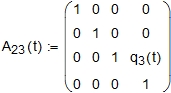
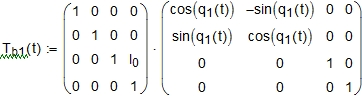
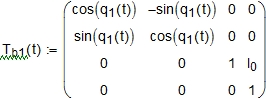
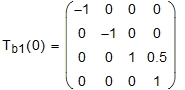
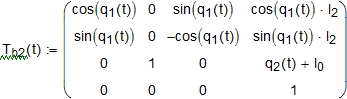
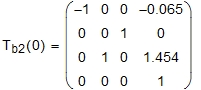
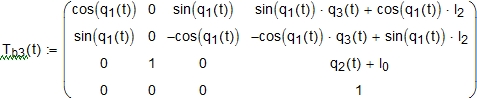
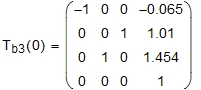
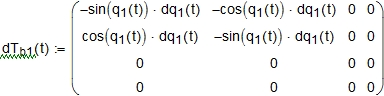
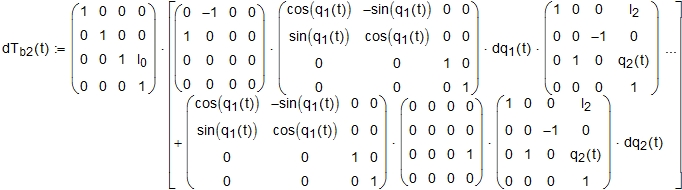
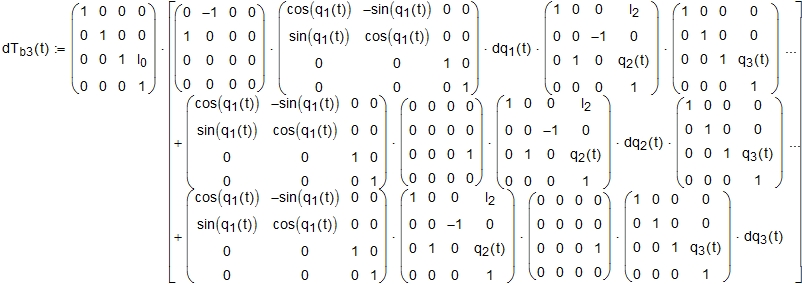
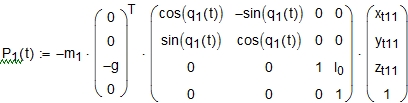
Pro sestavení rovnic inverzní úlohy je celková transformační matice vyjádřena symbolickým vynásobením jednotlivých matic
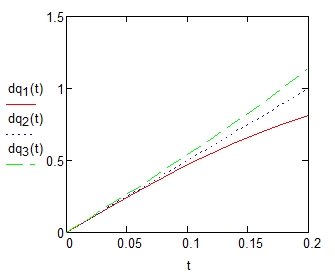
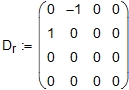
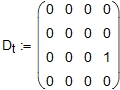
Vzájemné rychlosti univerzální obecný tvar - vystupuje zde parciální derivace vektoru p podle kloubové proměnné q - pomocí diferenciálních operátorů
Alternativně nejprve derivace vektoru p23 v lokálním souřadném systému, výsledkem je vektor rychlosti v lokálním ss., ten se vyjádří v základním ss. jen násobením submaticí rotace
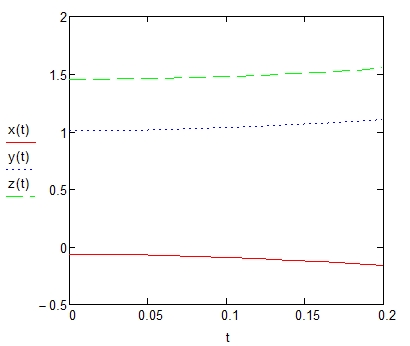
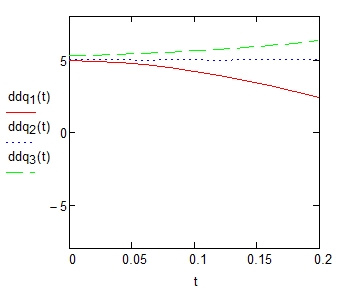
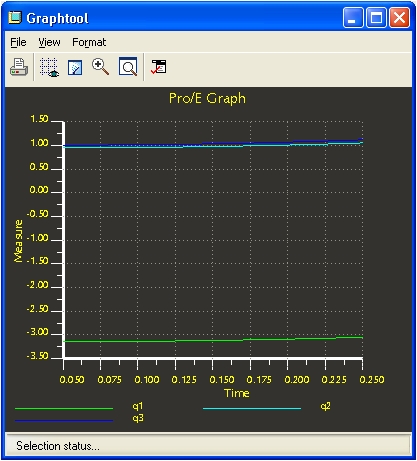
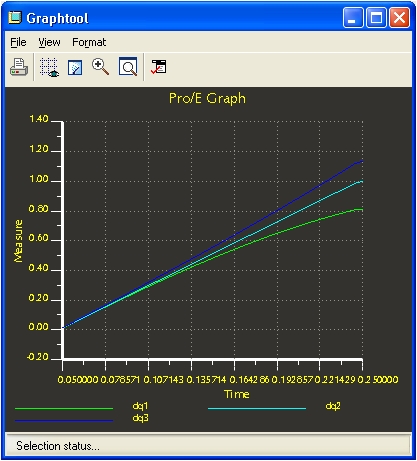
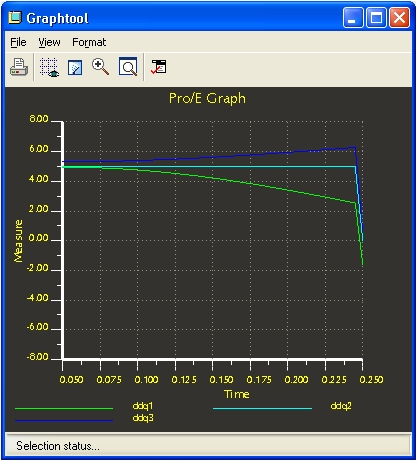
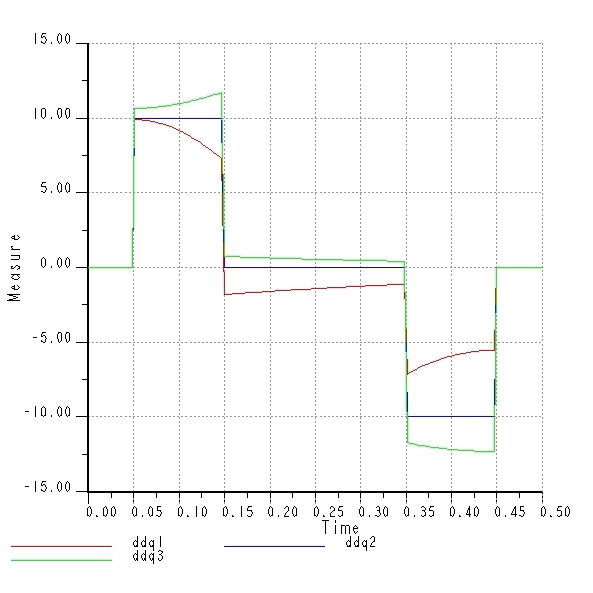
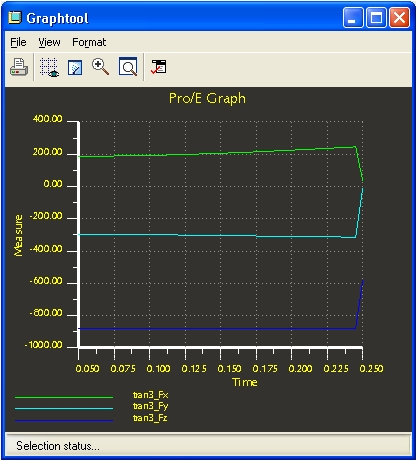
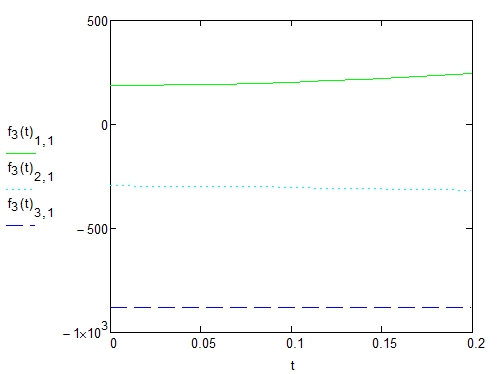
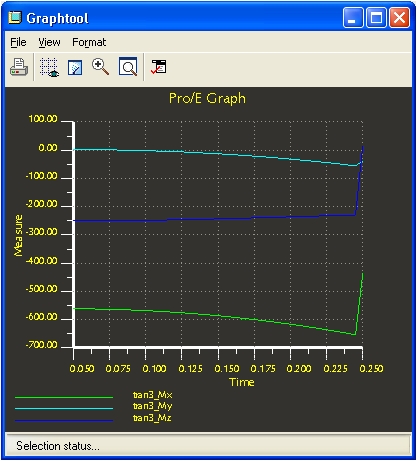
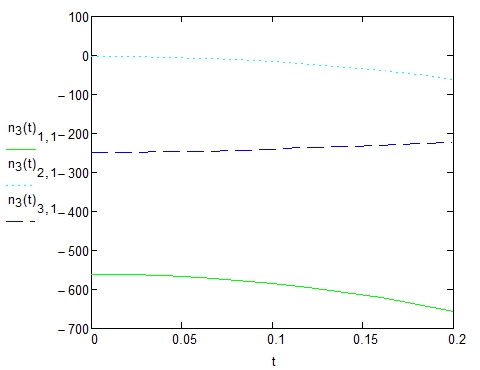
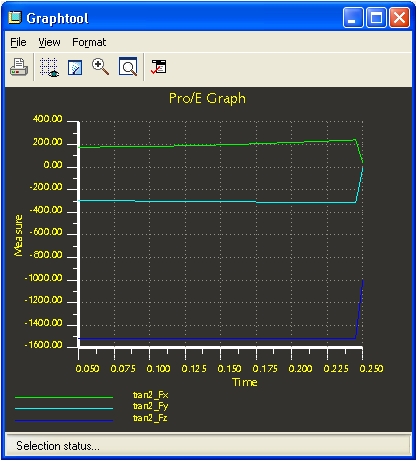
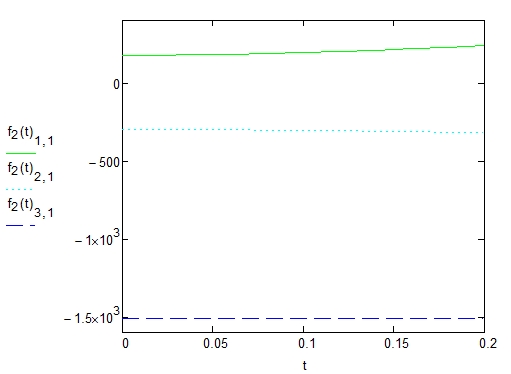
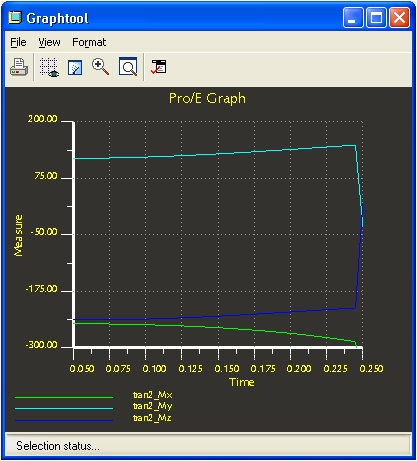
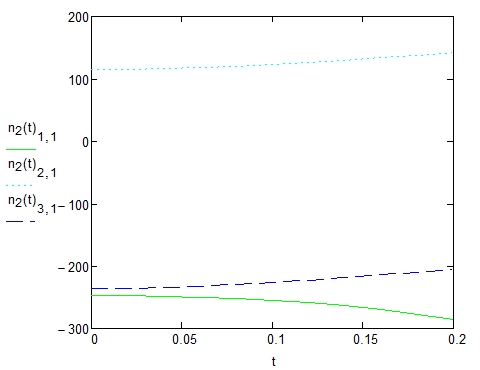
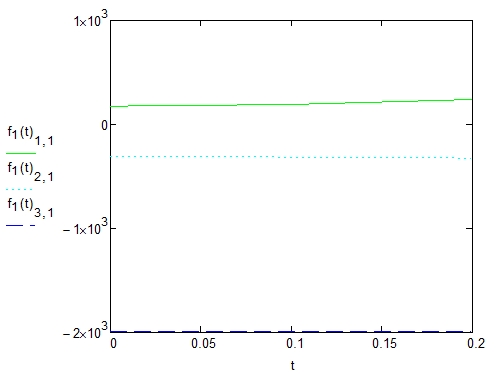
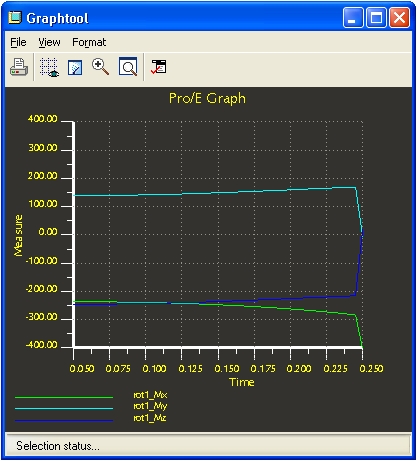
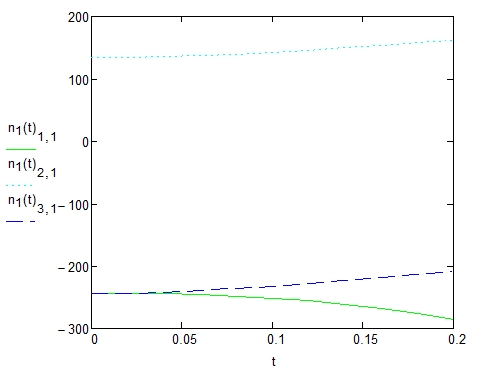
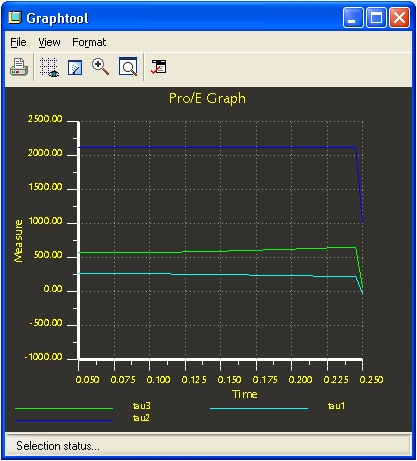
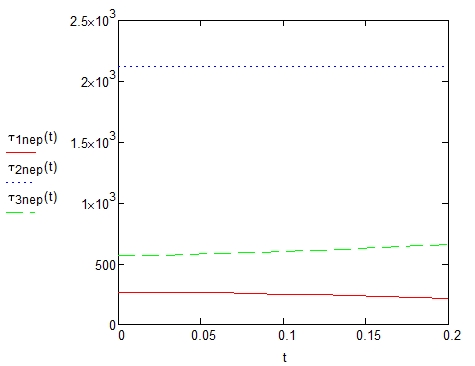
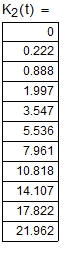
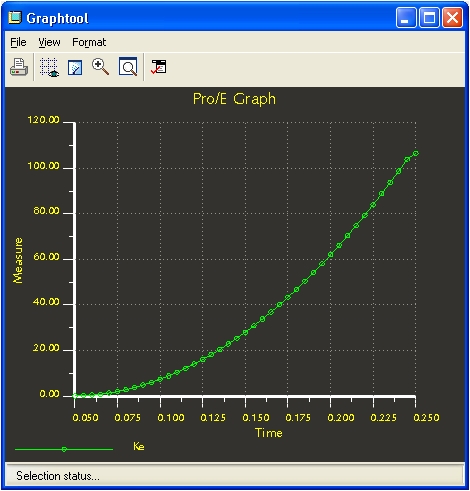
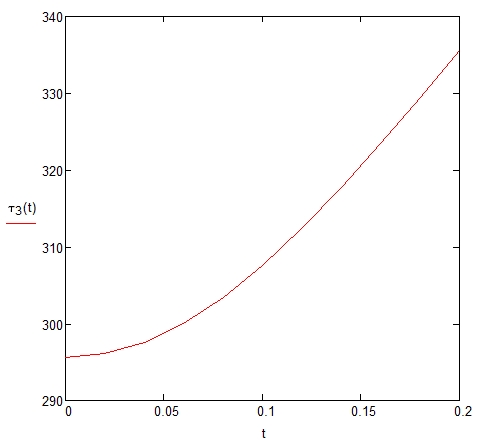
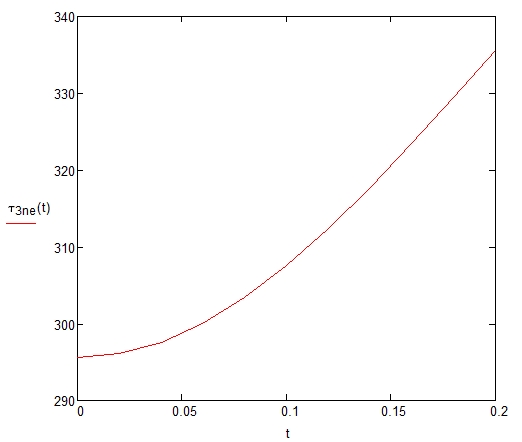
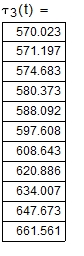
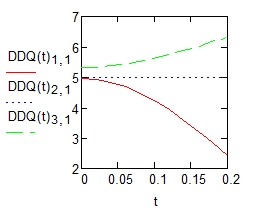
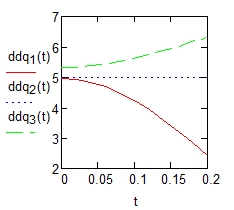
Tento úkon kontroly je velmi důležitý, pohyb koncového bodu byl řešením inverzní úlohy rozložen do jednotlivých kloubů, byly vypočteny průběhy rychlostí a zrychlení (translační i rotační) a ve zrychlení a3 se všechny veličiny skládají. Pokud tato veličina je shodná se zadáním, je jistota správnosti výpočtu až po toto místo řešení
CENTER OF GRAVITY with respect to LCS1 coordinate frame:
X Y Z -4.0325987e-02 -1.8024766e-06 7.3574162e-01 M
CENTER OF GRAVITY with respect to LCS2 coordinate frame:
X Y Z -7.2368752e-02 0.0000000e+00 -4.7439674e-02 M
CENTER OF GRAVITY with respect to LCS3 coordinate frame:
X Y Z 2.5740416e-03 0.0000000e+00 -3.7039760e-01 M
MASS = 4.8824683e+01 KILOGRAM
CENTER OF GRAVITY with respect to LCS1 coordinate frame:
X Y Z -4.0325987e-02 -1.8024766e-06 7.3574162e-01 M
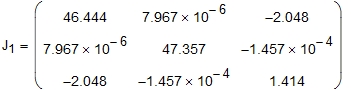
INERTIA with respect to LCS1 coordinate frame: (KILOGRAM * M^2)
INERTIA TENSOR:
Ixx Ixy Ixz 4.6443693e+01 -7.9670815e-06 2.0478701e+00
Iyx Iyy Iyz -7.9670815e-06 4.7356949e+01 1.4573962e-04
Izx Izy Izz 2.0478701e+00 1.4573962e-04 1.4139746e+00
INERTIA at CENTER OF GRAVITY with respect to LCS1 coordinate frame: (KILOGRAM * M^2)
INERTIA TENSOR:
Ixx Ixy Ixz 2.0014124e+01 -4.4181788e-06 5.9926583e-01
Iyx Iyy Iyz -4.4181788e-06 2.0847982e+01 8.0990420e-05
Izx Izy Izz 5.9926583e-01 8.0990420e-05 1.3345766e+00
TRAN2
MASS = 4.2894906e+01 KILOGRAM
CENTER OF GRAVITY with respect to LCS2 coordinate frame:
X Y Z -7.2368752e-02 0.0000000e+00 -4.7439674e-02 M
INERTIA with respect to LCS2 coordinate frame: (KILOGRAM * M^2)
INERTIA TENSOR:
Ixx Ixy Ixz 1.0344896e+00 0.0000000e+00 -1.2186605e-01
Iyx Iyy Iyz 0.0000000e+00 1.7935719e+00 0.0000000e+00
Izx Izy Izz -1.2186605e-01 0.0000000e+00 1.4614205e+00
INERTIA at CENTER OF GRAVITY with respect to LCS2 coordinate frame: (KILOGRAM * M^2)
INERTIA TENSOR:
Ixx Ixy Ixz 9.3795366e-01 0.0000000e+00 2.5398594e-02
Iyx Iyy Iyz 0.0000000e+00 1.4723852e+00 0.0000000e+00
Izx Izy Izz 2.5398594e-02 0.0000000e+00 1.2367697e+00
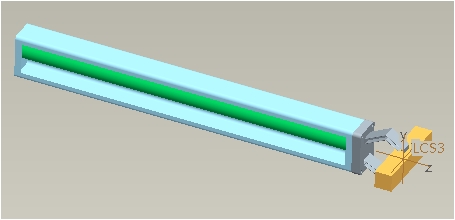
TRAN3
MASS = 5.9261161e+01 KILOGRAM
CENTER OF GRAVITY with respect to LCS3 coordinate frame:
X Y Z 2.5740416e-03 0.0000000e+00 -3.7039760e-01 M
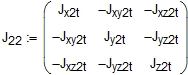
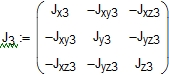
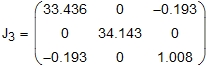
INERTIA with respect to LCS3 coordinate frame: (KILOGRAM * M^2)
INERTIA TENSOR:
Ixx Ixy Ixz 3.3435680e+01 0.0000000e+00 1.9296398e-01
Iyx Iyy Iyz 0.0000000e+00 3.4142950e+01 0.0000000e+00
Izx Izy Izz 1.9296398e-01 0.0000000e+00 1.0075258e+00
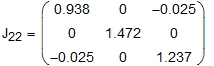
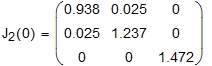
INERTIA at CENTER OF GRAVITY with respect to LCS3 coordinate frame: (KILOGRAM * M^2)
INERTIA TENSOR:
Ixx Ixy Ixz 2.5305381e+01 0.0000000e+00 1.3646327e-01
Iyx Iyy Iyz 0.0000000e+00 2.6012259e+01 0.0000000e+00
Izx Izy Izz 1.3646327e-01 0.0000000e+00 1.0071331e+00
Pozor !!!!! Zatím není uvažován vliv vnitřních převodů a rozvodů, také výsledky z Pro/E jsou pro mechanismus s odpojenými (uvnitř nepohyblivými) vnitřními převody - vystupují tam jen jako hmotnost, nejsou zahrnuty jejich redukované momenty setrvačnosti při roztáčení !!!!!!!!!!!!!!!!!!!!!!!
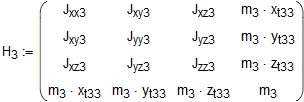
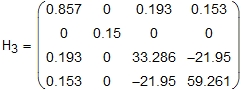
Zahrnutí zvýšení redukované hmotnosti článku TRAN2 vlivem zrychlení rotoru MOT2 a jeho převodovky a pohybového šroubu
Zahrnutí zvýšení redukované hmotnosti vlivem zrychlení rotoru motoru MOT3, ozubeného kola a matice pohybového šroubu (řemen neuvažován)
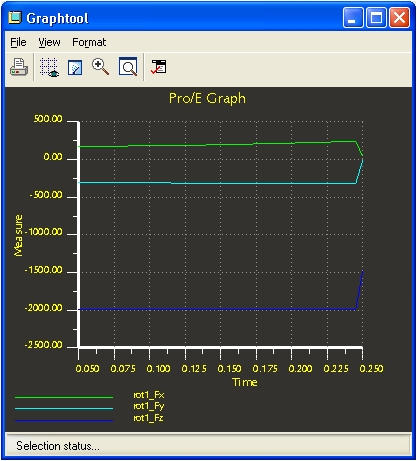
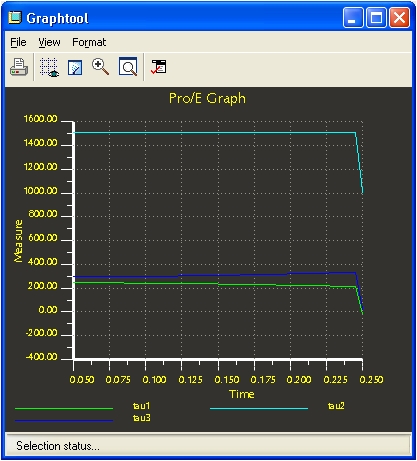
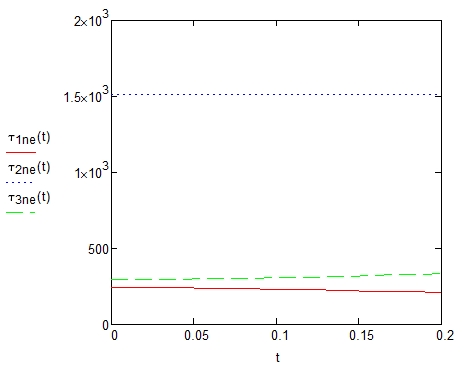
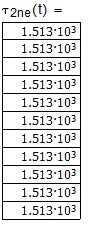
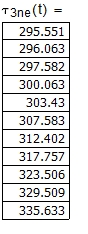
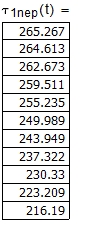
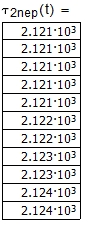
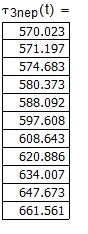
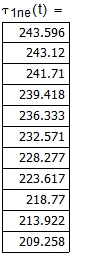
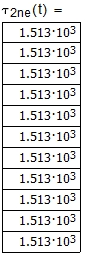
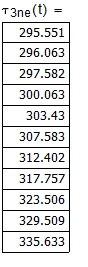
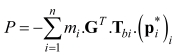
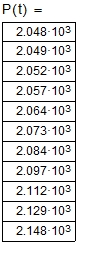
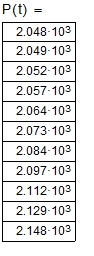
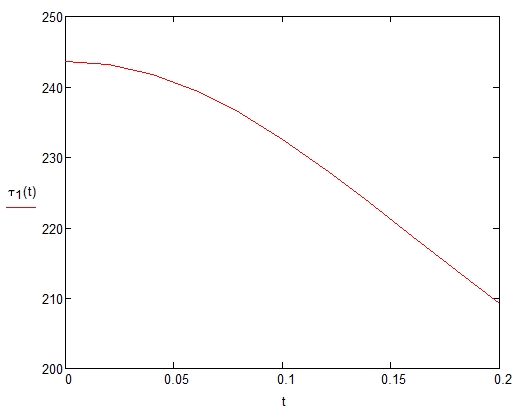
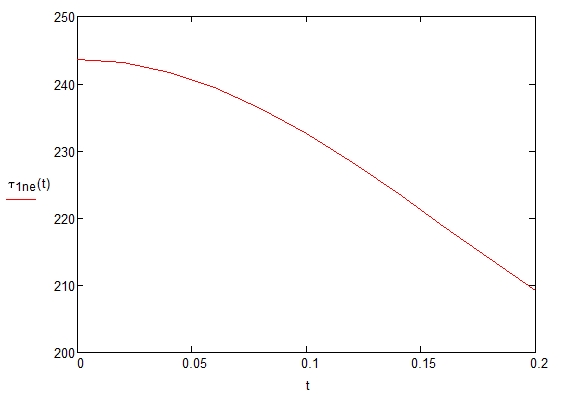
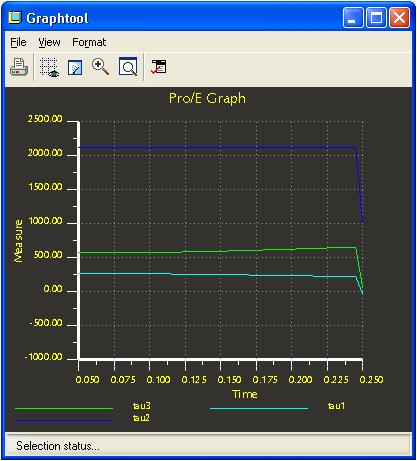
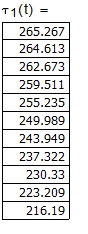
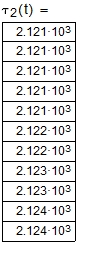
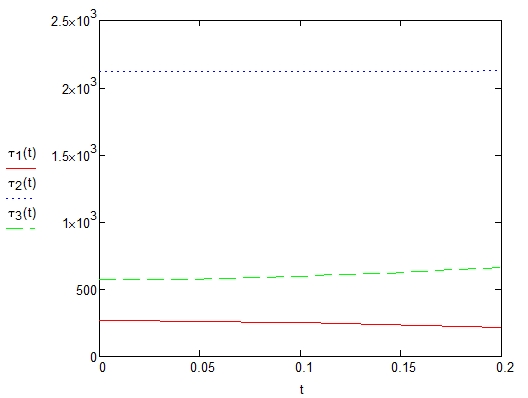
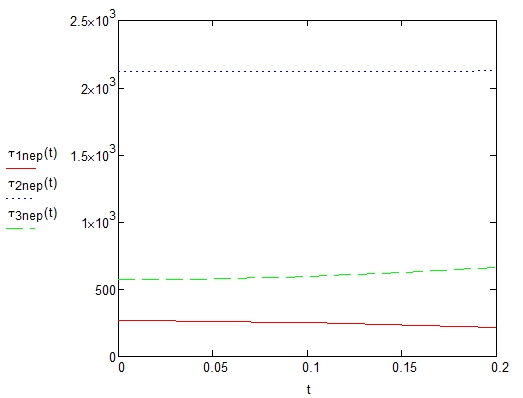
Z porovnání vyplývá, že zobecněné síly s uvažováním vnitřních převodů jsou výrazně vyšší (u třetí osy téměř dvojnásobek), není možno redukované momenty vnitřních převodů zanedbat
ROT1
MASS = 4.8824683e+01 KILOGRAM
CENTER OF GRAVITY with respect to LCS1 coordinate frame:
X Y Z -4.0325987e-02 -1.8024766e-06 7.3574162e-01 M
INERTIA with respect to LCS1 coordinate frame: (KILOGRAM * M^2)
INERTIA TENSOR:
Ixx Ixy Ixz 4.6443693e+01 -7.9670815e-06 2.0478701e+00
Iyx Iyy Iyz -7.9670815e-06 4.7356949e+01 1.4573962e-04
Izx Izy Izz 2.0478701e+00 1.4573962e-04 1.4139746e+00
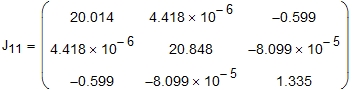
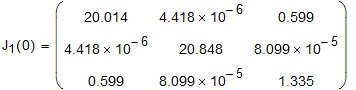
INERTIA at CENTER OF GRAVITY with respect to LCS1 coordinate frame: (KILOGRAM * M^2)
INERTIA TENSOR:
Ixx Ixy Ixz 2.0014124e+01 -4.4181788e-06 5.9926583e-01
Iyx Iyy Iyz -4.4181788e-06 2.0847982e+01 8.0990420e-05
Izx Izy Izz 5.9926583e-01 8.0990420e-05 1.3345766e+00
Pozor - pro Lagrangeovu pohybovou rovnici se použije matice setrvačnosti k lokálnímu souřadnému systému (ta první v pořadí), pro N-E vztahy byla předtím použita matice setrvačnosti k těžišti (druhá matice)
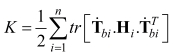
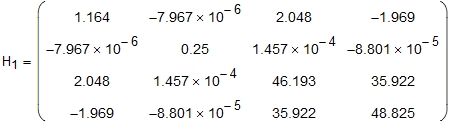
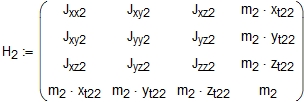
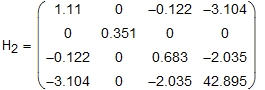
Pro odvození výrazu pro kinetickou energii pro ruční použití v Lagr.rov. II. druhu provedeme symbolicky roznásobení (Shift+F9)
TRAN2
MASS = 4.2894906e+01 KILOGRAM
CENTER OF GRAVITY with respect to LCS2 coordinate frame:
X Y Z -7.2368752e-02 0.0000000e+00 -4.7439674e-02 M
INERTIA with respect to LCS2 coordinate frame: (KILOGRAM * M^2)
INERTIA TENSOR:
Ixx Ixy Ixz 1.0344896e+00 0.0000000e+00 -1.2186605e-01
Iyx Iyy Iyz 0.0000000e+00 1.7935719e+00 0.0000000e+00
Izx Izy Izz -1.2186605e-01 0.0000000e+00 1.4614205e+00
INERTIA at CENTER OF GRAVITY with respect to LCS2 coordinate frame: (KILOGRAM * M^2)
INERTIA TENSOR:
Ixx Ixy Ixz 9.3795366e-01 0.0000000e+00 2.5398594e-02
Iyx Iyy Iyz 0.0000000e+00 1.4723852e+00 0.0000000e+00
Izx Izy Izz 2.5398594e-02 0.0000000e+00 1.2367697e+00
Pro odvození výrazu pro kinetickou energii pro ruční použití v Lagr.rov. II. druhu provedeme symbolicky roznásobení (Shift+F9)
TRAN3
MASS = 5.9261161e+01 KILOGRAM
CENTER OF GRAVITY with respect to LCS3 coordinate frame:
X Y Z 2.5740416e-03 0.0000000e+00 -3.7039760e-01 M
INERTIA with respect to LCS3 coordinate frame: (KILOGRAM * M^2)
INERTIA TENSOR:
Ixx Ixy Ixz 3.3435680e+01 0.0000000e+00 1.9296398e-01
Iyx Iyy Iyz 0.0000000e+00 3.4142950e+01 0.0000000e+00
Izx Izy Izz 1.9296398e-01 0.0000000e+00 1.0075258e+00
INERTIA at CENTER OF GRAVITY with respect to LCS3 coordinate frame: (KILOGRAM * M^2)
INERTIA TENSOR:
Ixx Ixy Ixz 2.5305381e+01 0.0000000e+00 1.3646327e-01
Iyx Iyy Iyz 0.0000000e+00 2.6012259e+01 0.0000000e+00
Izx Izy Izz 1.3646327e-01 0.0000000e+00 1.0071331e+00
Pro odvození výrazu pro kinetickou energii pro ruční použití v Lagr.rov. II. druhu provedeme symbolicky roznásobení (Shift+F9)
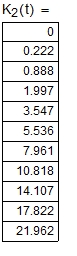
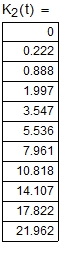
Mathcad neumí symbolicky, proto ručně, v kinetické energii nikde není q1(t), proto výsledek druhého členu je 0
Zahrnutí zvýšení redukované hmotnosti článku TRAN2 vlivem zrychlení rotoru MOT2 a jeho převodovky a pohybového šroubu
Zahrnutí zvýšení redukované hmotnosti vlivem zrychlení rotoru motoru MOT3, ozubeného kola a matice pohybového šroubu (řemen neuvažován)