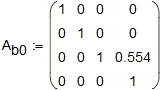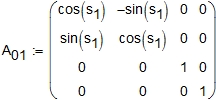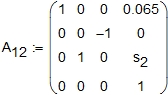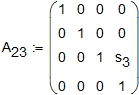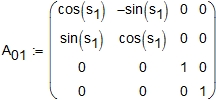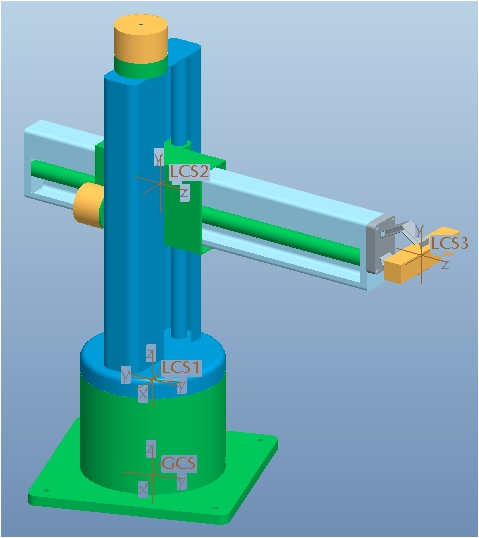
Tabulka parametrů (Denavit-Hartenberg)
theta d a alfa
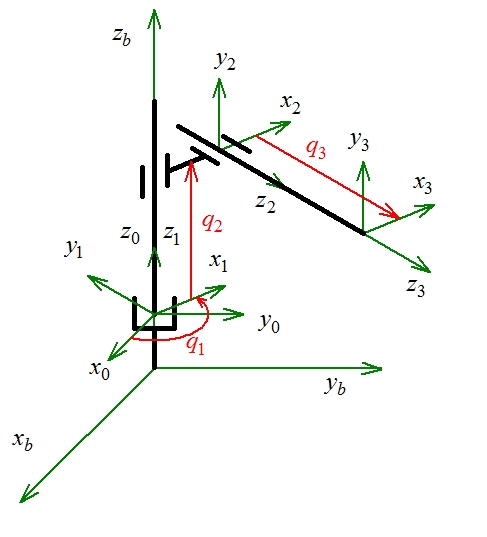
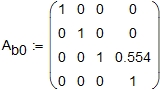
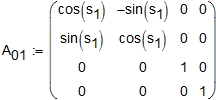
0 0 0.554 0 0
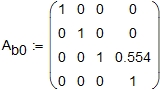
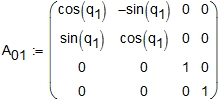
1 q1 0 0 0
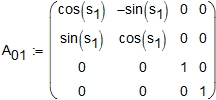
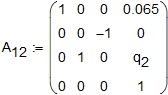
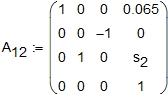
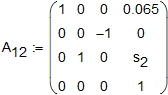
2 0 q2 0.065 Pi/2
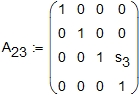
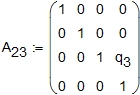
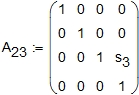
3 0 q3 0 0
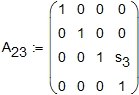
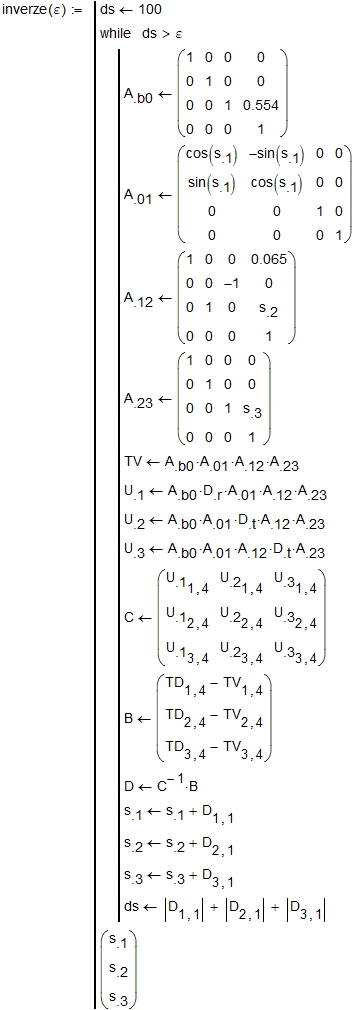
Výchozí poloha - pro výchozí polohu a výpočet inverzní úlohy jsou na místě kloubových proměnných použity proměnné s1, s2, a s3. Kloubové proměnné q1, q2 a q3 jsou použity pro kontrolu správnosti výpočtu
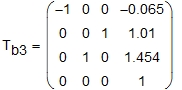
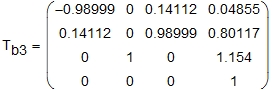
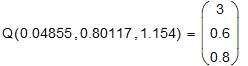
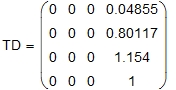
Žádaná poloha je pro účely kontroly výpočtu poněkud ošizená - je vypočtená předem, ze známých hodnot kloubových proměnných je vypočtena celková transformační matice Tb3 a hodnoty x, y, z z posledního sloupce této matice jsou použity v dalším výpočtu jako žádané hodnoty. Je to jen pro kontrolu, k těmto hodnotám kloubových proměnných se má dojít výpočtem.
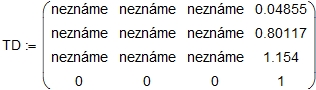
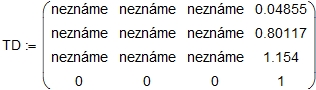
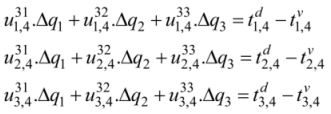
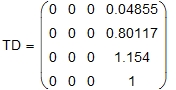
V transformační matici v žádané poloze známe pouze poslední sloupec, protože ale mechanismus má jen tři stupně volnosti, tak to stačí na sestavení soustavy rovnic. Zde v Matcadu musíme ale doplnit tuto matici např. nulami, abychom s ní mohli pracovat
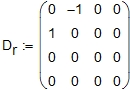
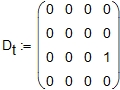
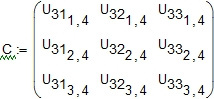
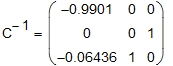
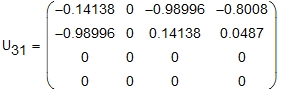
Řešení soustavy transcendentních rovnic je provedeno jako kontrolní řešení správnosti výpočtu pomocí Taylorova rozvoje transformační matice
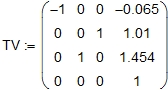
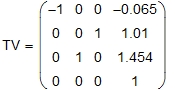
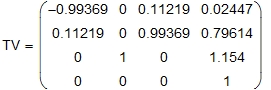
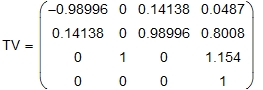
Je vypočtena transformační matice Tb3 ve výchozí poloze a je uložena jako matice TV, matice TD - žádaná poloha zústává konstantní
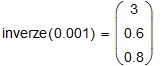
Při pohledu na vypočtené kloubové proměnné vidíme, že s1 se liší o 29 tisícin radiánu, s2 je již vypočtena přesně ( je nastaveno zobrazování na 5 desetinných míst), s3 se liší zhruba o 7 mm. Je tedy nutná další iterace. Je to způsobeno poměrně velkým rozdílem mezi výchozí a žádanou polohou. Pokud bude tento rozdíl malý, řešení je nalezeno již po jedné iteraci.
Je vypočtena transformační matice Tb3 ve výchozí poloze a je uložena jako matice TV, matice TD - žádaná poloha zústává konstantní
Při pohledu na vypočtené kloubové proměnné vidíme, že s1 se liší o necelou tisícinu radiánu, s2 je vypočtena přesně ( je nastaveno zobrazování na 5 desetinných míst), s3 se liší zhruba o 4 desetitisíciny mm. To by pro běžnou přesnost v robotice již stačilo. Pro ještě přesnější výpočet je provedena ještě další iterace.
Je vypočtena transformační matice Tb3 ve výchozí poloze a je uložena jako matice TV, matice TD - žádaná poloha zústává konstantní
Po třetí iteraci jsou již hodnoty hledaných kloubových proměnných vypočteny naprosto správně (zobrazení výsledku je nastaveno na pět desetinných míst), odpovídají referenčním hodnotám a výpočet může skončit