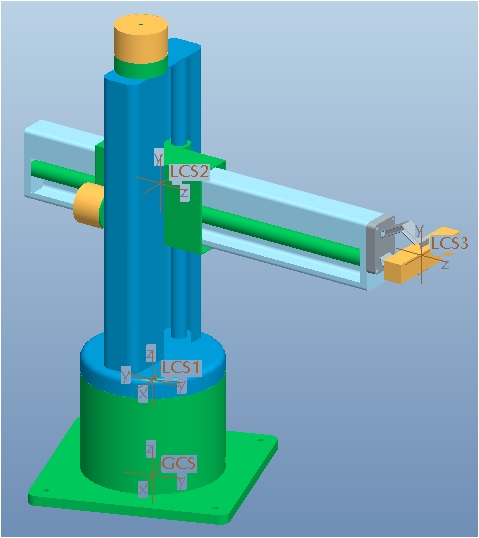
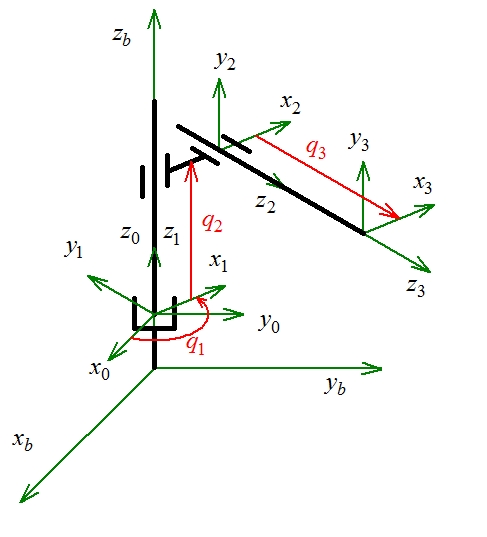
Zjednodušená kinematická struktura
Tabulka parametrů (Denavit-Hartenberg)
theta d a alfa
0 0 0.554 0 0
1 q1 0 0 0
2 0 q2 0.065 Pi/2
3 0 q3 0 0
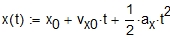
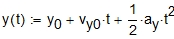
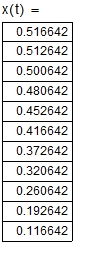
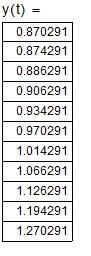
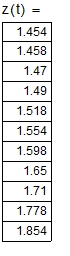
Parametry pohybu koncového bodu
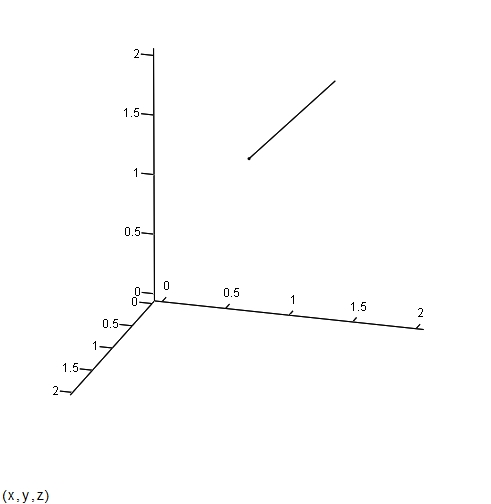
Trajektorie koncového bodu ve 3D
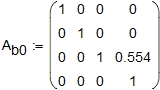
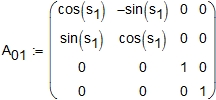
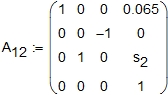
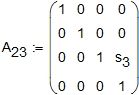
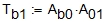
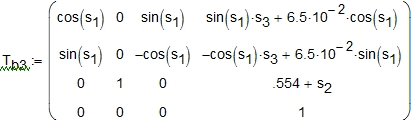
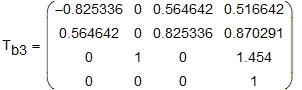
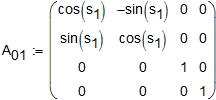
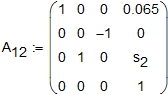
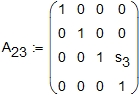
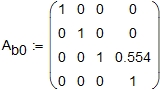
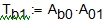
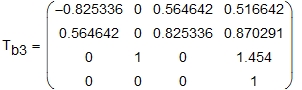
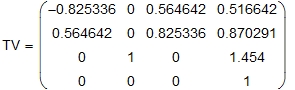
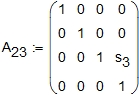
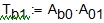
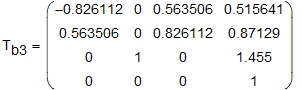
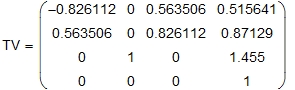
Transformační matice mezi souřadnými systémy
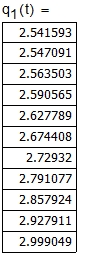
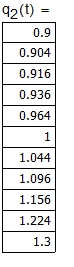
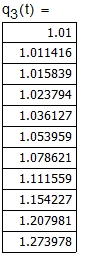
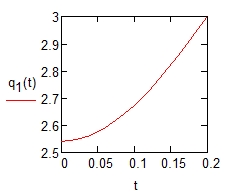
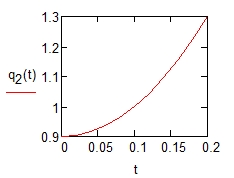
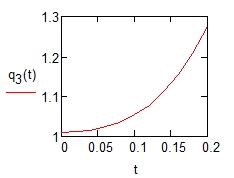
Řešení soustavy transcendentních rovnic - nalezení referenčních průběhů kloubových proměnných q1, q2 a q3
Řešení pomocí Jacobiho matice
Transformační matice mezi souřadnými systémy
Všechny vektory je třeba vyjádřit v základním souřadném systému
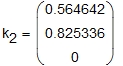
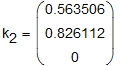
Potřebné vektory ve výchozí poloze
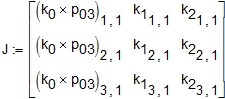
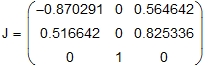
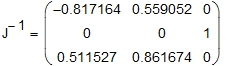
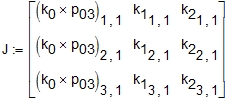
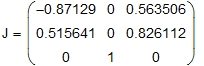
Jakobiho matice ve výchozí poloze
Tento zápis je matematicky správný, ale v ptosředí Matcad neplatný. Mathcad nesprávně přiřadí hodnoty, do matice nelze zapsat vektor, popř. jinou matici. Je nutno vkládat přímo jednotlivé prvky !!!!!!
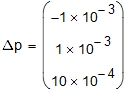
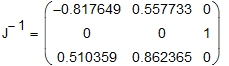
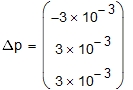
Žádaná hodnota na regulátory polohy
Transformační matice mezi souřadnými systémy
Všechny vektory je třeba vyjádřit v základním souřadném systému
Potřebné vektory ve výchozí poloze
Jakobiho matice ve výchozí poloze
Žádaná hodnota na regulátory polohy - zde je vidět, že rychlost je větší a tedy i změna polohy koncového bodu za nastavený časový krok - výpočet již není tak přesný, ale vyhovuje
Obdobně by výpočet pokračoval dále, naprogramovaný v některém vhodném programovacím jazyce
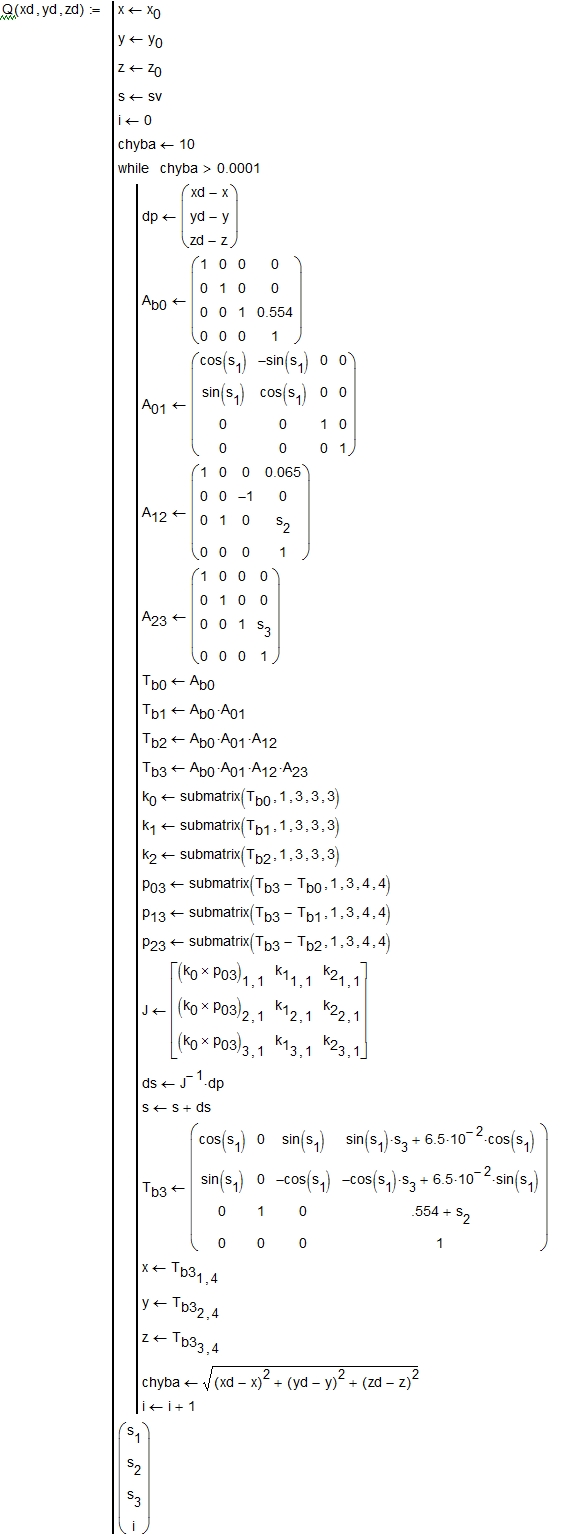
Program v prostředí Mathcad, zadána výchozí poloha koncového bodu a výchozí kloubové proměnné
Počáteční kloubové proměnné
Definice výpočtové funkce - argumenty této funkce jsou žádané hodnoty xd,yd a zd. Pozor - indexy u kloubové proměnné jsou indexy vektoru s (vkládané levou hranatou závorkou), ne textové indexy (ty se vkládají pomocí tečky)
Použití programového výpočtu