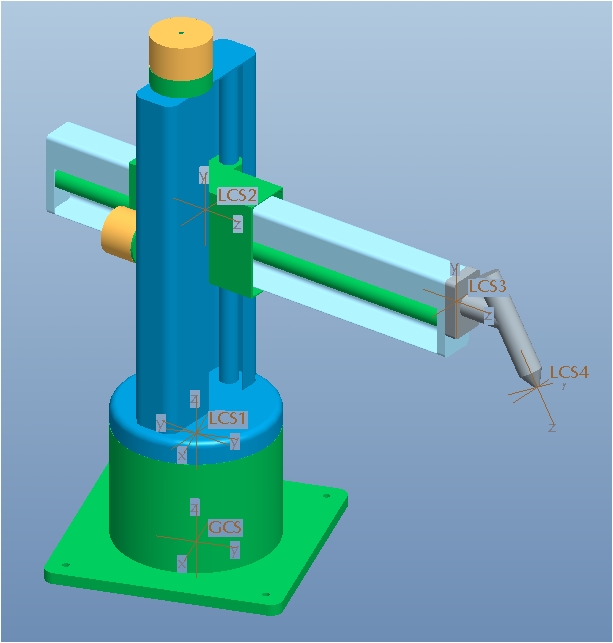
Model v Pro/Engineer v obecné poloze natočení
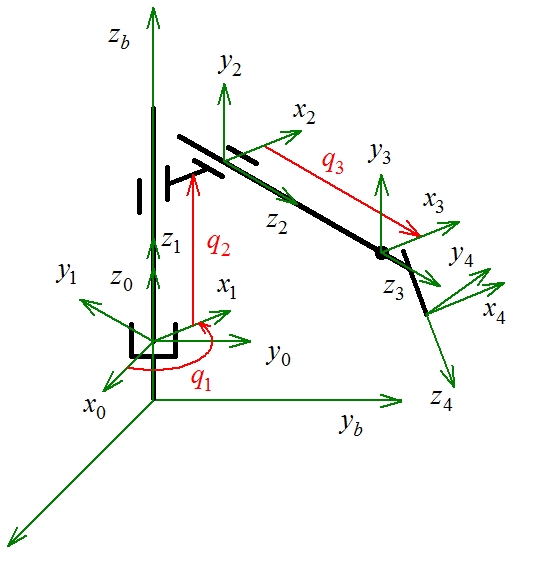
Tabulka parametrů (Denavit-Hartenberg)
theta d a alfa
0 0 l0 0 0
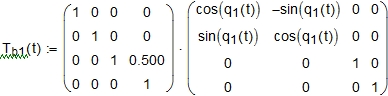
1 q1 0 0 0
2 0 q2 l2 Pi/2
3 0 q3 0 0
4 DH parametry nepoužity
rozsah času pro definici pohybu
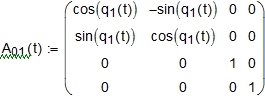
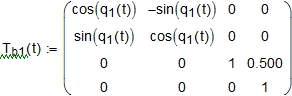
Zadání průběhu 1 zobecněné souřadnice (natočení)
Zadání průběhu 2 zobecněné souřadnice (zdvih)
Zadání průběhu 3 zobecněné souřadnice (výsuv)
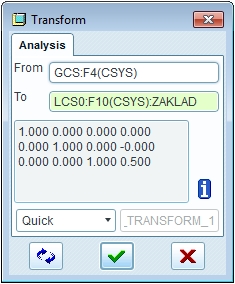
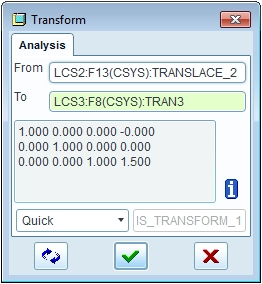
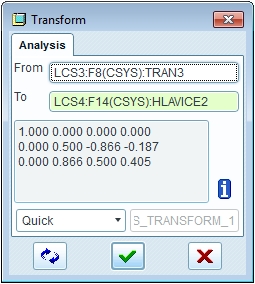
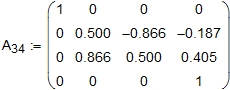
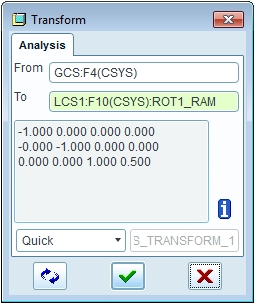
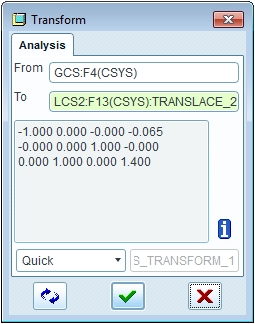
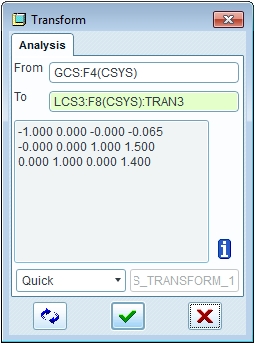
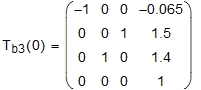
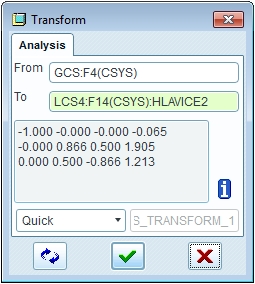
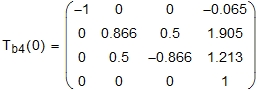
Poslední transformační matice mezi LCS3 a LCS4 (hlavice) je určena odměřením v prostředí Pro/E
matice je konstantní, proto není funkcí času
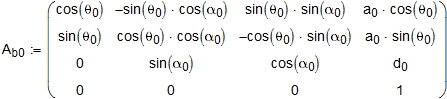
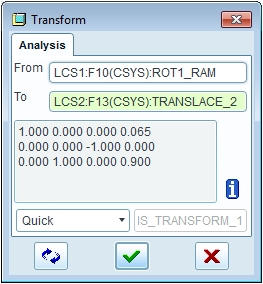
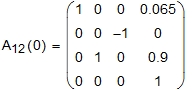
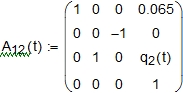
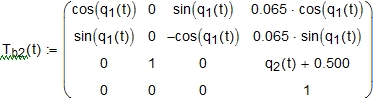
Vyčíslení transformačních matic mezi základním a lokálními souřadnými systémy,
tyto matice jsou také vypočteny symbolicky (Shift+F9)
Celková transformační matice mezi zákl. ss (GCS) a posledním ss (LCS4)
Směry jednotkových vektorů na osách posledního ss (LCS4)
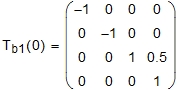
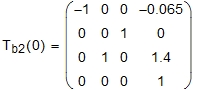
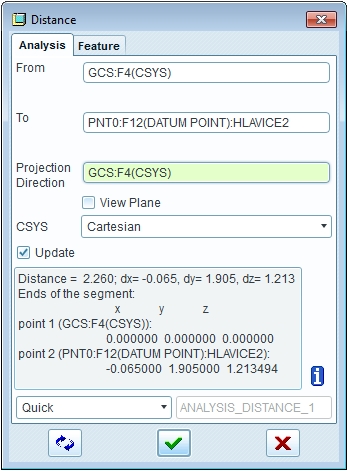
Vyčíslení směrů jednotlových vektorů na osách LCS4 v čase 0 (místo 0 lze zadat čas 0-3 sec)
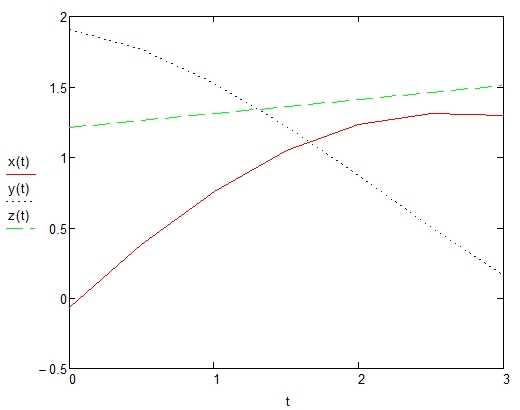
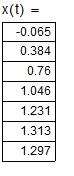
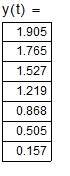
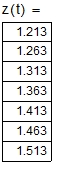
Průběh polohy koncového bodu
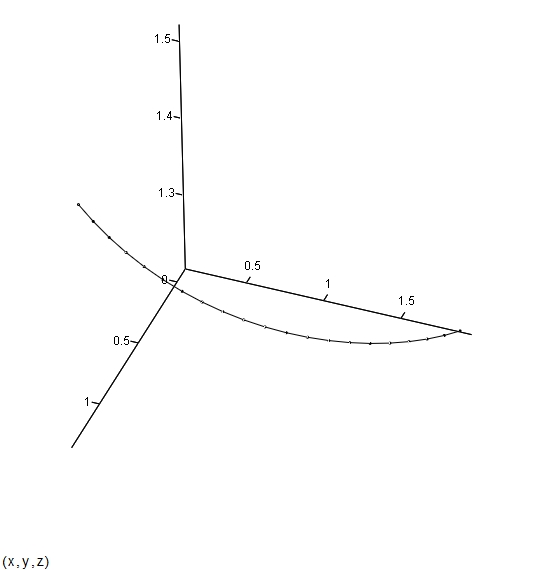
Průběh polohy koncového bodu ve 3D zobrazení (natočení myší)
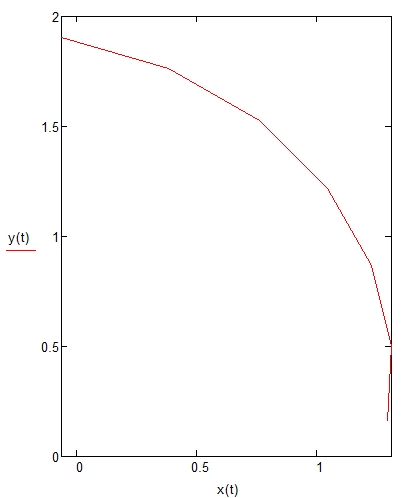
Průmět trajektorie do půdorysu (roviny xy)