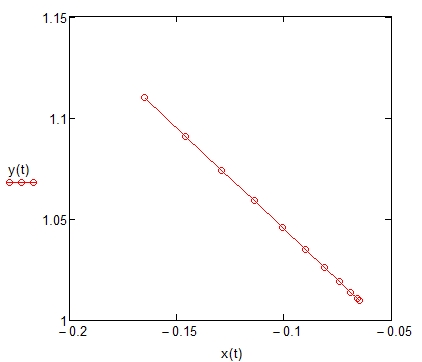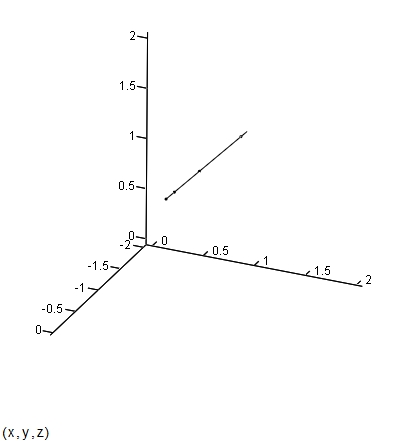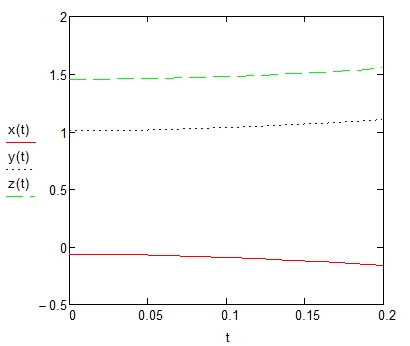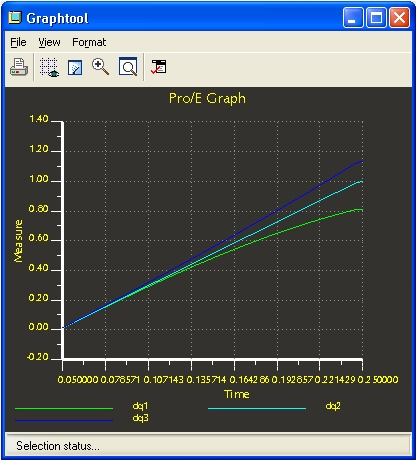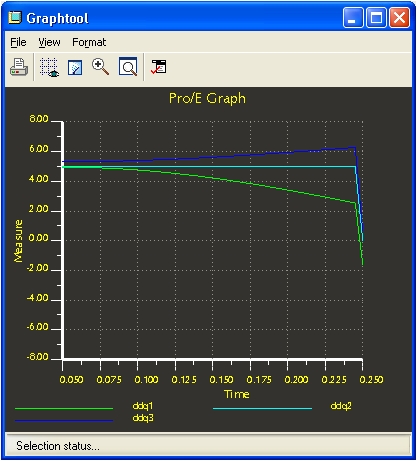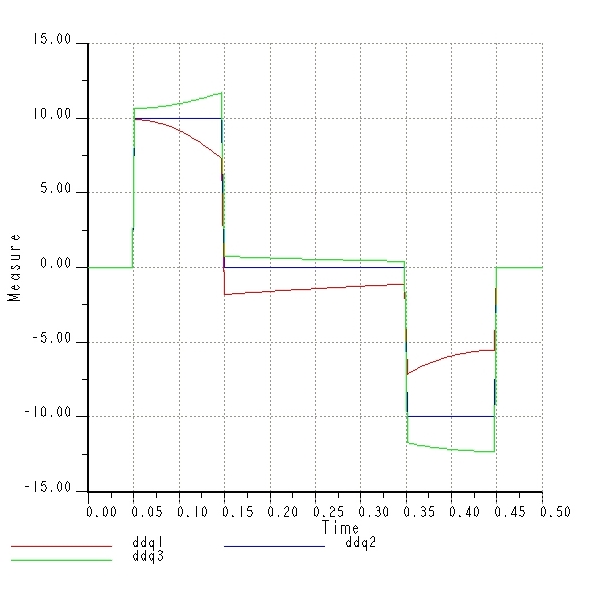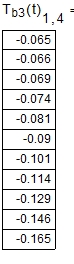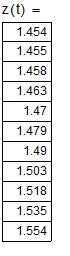
Rovnice pohybu počátku LCS3 - rovnoměrně zrychlený pohyb, trajektorii je vhodné řešit po částech s použitím počáteční polohy a rychlosti z koncových hodnot předchozího segmentu trajektorie
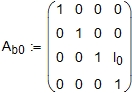
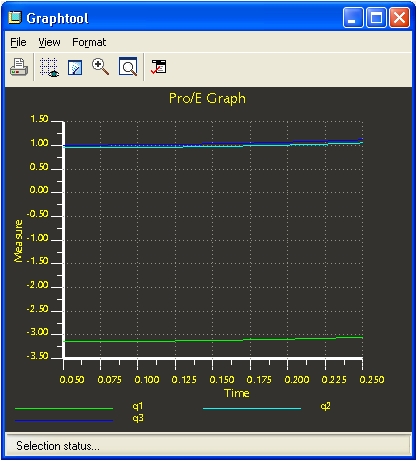
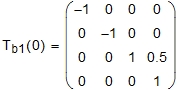
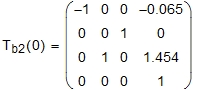
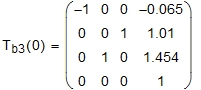
Výchozí hodnota kloubových proměnných odpovídající výchozí poloze konc.bodu nutná pro řešič inverzní úlohy (Given, Find)
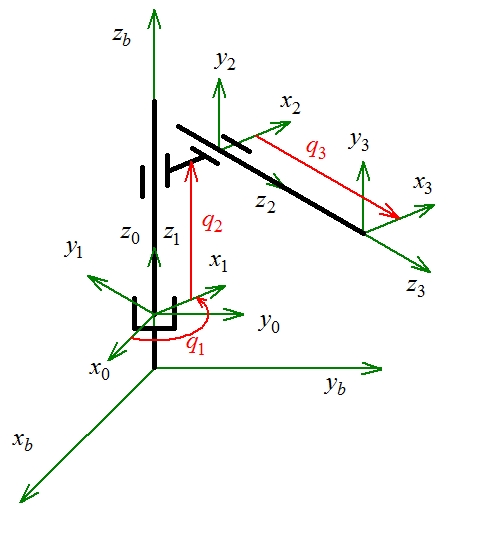
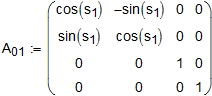
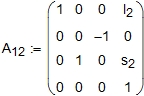
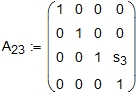
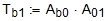
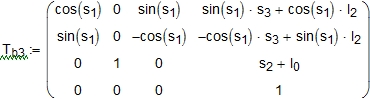
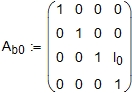
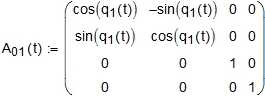
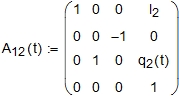
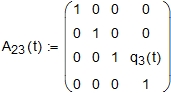
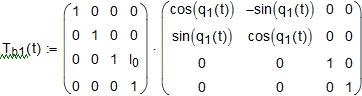
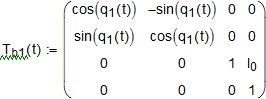
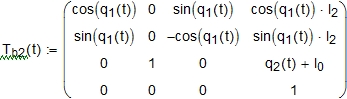
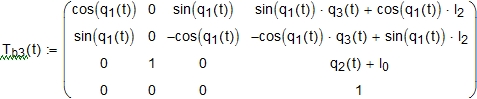
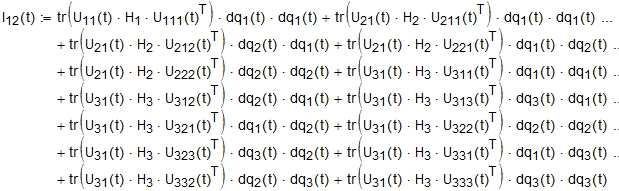
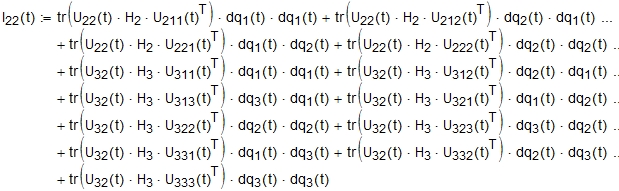
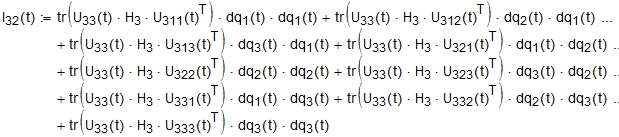
Pro sestavení rovnic inverzní úlohy je celková transformační matice vyjádřena symbolickým vynásobením jednotlivých matic
ROT1
MASS = 4.8824683e+01 KILOGRAM
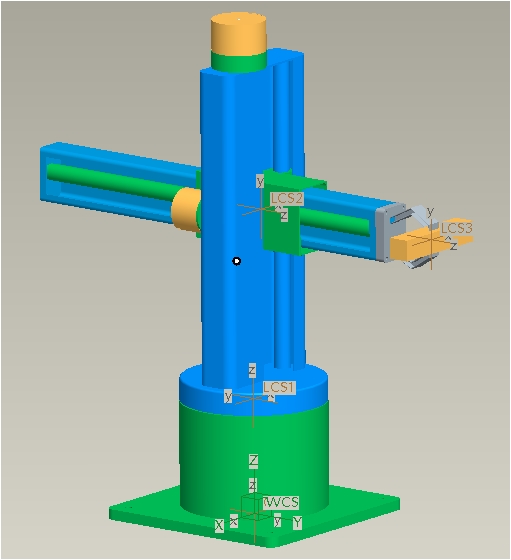
CENTER OF GRAVITY with respect to LCS1 coordinate frame:
X Y Z -4.0325987e-02 -1.8024766e-06 7.3574162e-01 M
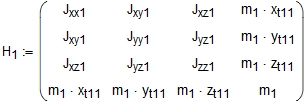
INERTIA with respect to LCS1 coordinate frame: (KILOGRAM * M^2)
INERTIA TENSOR:
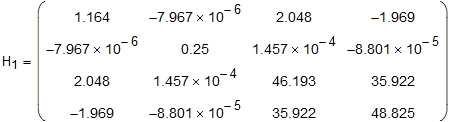
Ixx Ixy Ixz 4.6443693e+01 -7.9670815e-06 2.0478701e+00
Iyx Iyy Iyz -7.9670815e-06 4.7356949e+01 1.4573962e-04
Izx Izy Izz 2.0478701e+00 1.4573962e-04 1.4139746e+00
INERTIA at CENTER OF GRAVITY with respect to LCS1 coordinate frame: (KILOGRAM * M^2)
INERTIA TENSOR:
Ixx Ixy Ixz 2.0014124e+01 -4.4181788e-06 5.9926583e-01
Iyx Iyy Iyz -4.4181788e-06 2.0847982e+01 8.0990420e-05
Izx Izy Izz 5.9926583e-01 8.0990420e-05 1.3345766e+00
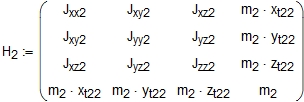
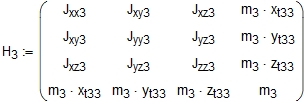
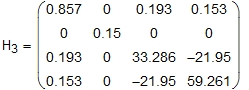
Pozor - pro Lagrangeovu pohybovou rovnici se použije matice setrvačnosti k lokálnímu souřadnému systému (ta první v pořadí), pro N-E vztahy byla předtím použita matice setrvačnosti k těžišti (druhá matice)
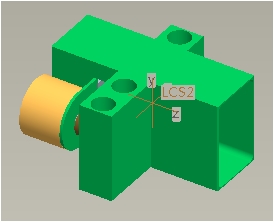
TRAN2
MASS = 4.2894906e+01 KILOGRAM
CENTER OF GRAVITY with respect to LCS2 coordinate frame:
X Y Z -7.2368752e-02 0.0000000e+00 -4.7439674e-02 M
INERTIA with respect to LCS2 coordinate frame: (KILOGRAM * M^2)
INERTIA TENSOR:
Ixx Ixy Ixz 1.0344896e+00 0.0000000e+00 -1.2186605e-01
Iyx Iyy Iyz 0.0000000e+00 1.7935719e+00 0.0000000e+00
Izx Izy Izz -1.2186605e-01 0.0000000e+00 1.4614205e+00
INERTIA at CENTER OF GRAVITY with respect to LCS2 coordinate frame: (KILOGRAM * M^2)
INERTIA TENSOR:
Ixx Ixy Ixz 9.3795366e-01 0.0000000e+00 2.5398594e-02
Iyx Iyy Iyz 0.0000000e+00 1.4723852e+00 0.0000000e+00
Izx Izy Izz 2.5398594e-02 0.0000000e+00 1.2367697e+00
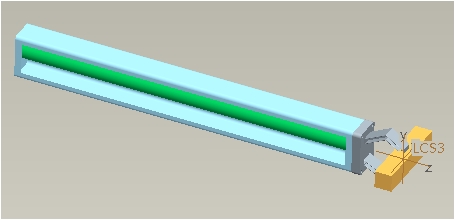
TRAN3
MASS = 5.9261161e+01 KILOGRAM
CENTER OF GRAVITY with respect to LCS3 coordinate frame:
X Y Z 2.5740416e-03 0.0000000e+00 -3.7039760e-01 M
INERTIA with respect to LCS3 coordinate frame: (KILOGRAM * M^2)
INERTIA TENSOR:
Ixx Ixy Ixz 3.3435680e+01 0.0000000e+00 1.9296398e-01
Iyx Iyy Iyz 0.0000000e+00 3.4142950e+01 0.0000000e+00
Izx Izy Izz 1.9296398e-01 0.0000000e+00 1.0075258e+00
INERTIA at CENTER OF GRAVITY with respect to LCS3 coordinate frame: (KILOGRAM * M^2)
INERTIA TENSOR:
Ixx Ixy Ixz 2.5305381e+01 0.0000000e+00 1.3646327e-01
Iyx Iyy Iyz 0.0000000e+00 2.6012259e+01 0.0000000e+00
Izx Izy Izz 1.3646327e-01 0.0000000e+00 1.0071331e+00