Mechanismus s jedním stupněm volnosti, rotace článku kolem osy x
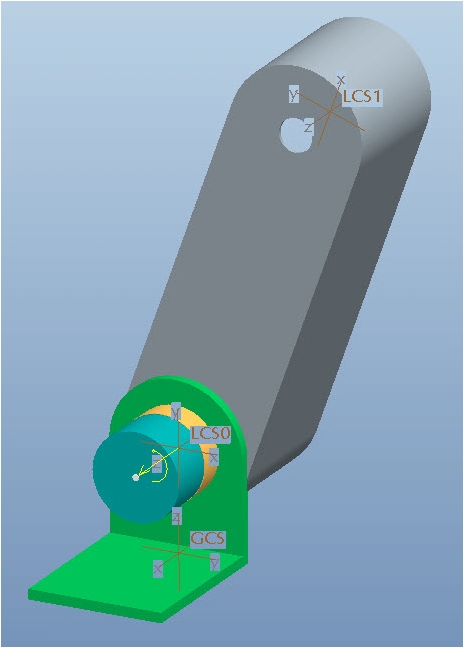
Obr.2 3D model mechanismu v Pro/E
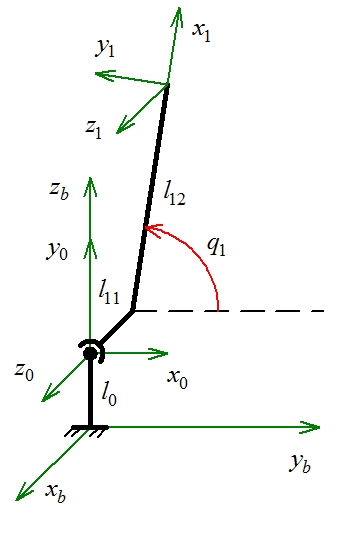
Obr.1 Kinematická struktura
Tabulka D-H parametrů
i theta d a alfa
0 Pi/2 l0 0 Pi/2
1 q1 -l11 l12 0
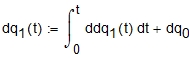
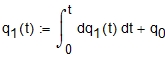
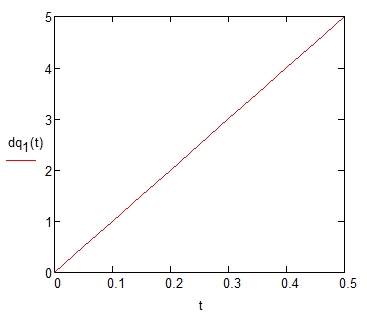
Alternativní možnost zadání průběhu polohy kloubu v čase - zadáním průběhu zrychlení, popř. rychlosti a integrací tohoto průběhu.
V prostředí Pro/E je nutno zadávat úhlové míry ve stupních, 10 rad/sec2 je 572,958 deg/sec2
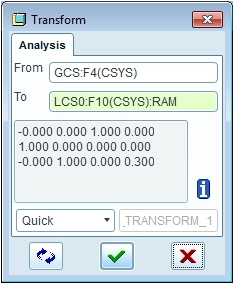
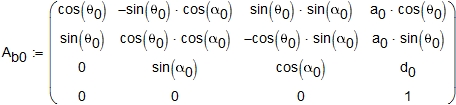
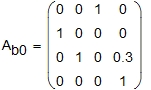
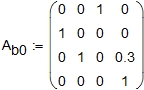
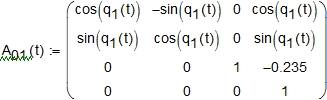
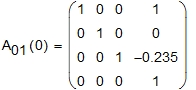
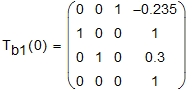
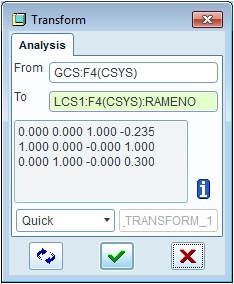
Transformační matice mezi základním (bázovým) souřadným systémem GCS a lokálním souřadným systémem LCS0 rámu (podstavce)
Po úpravě (vhodnější pro Mathcad)
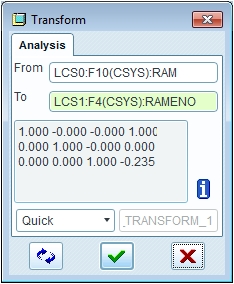
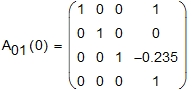
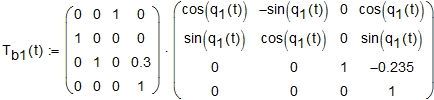
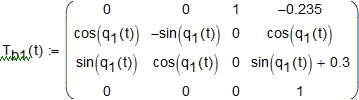
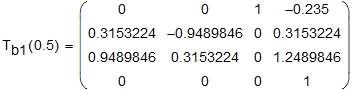
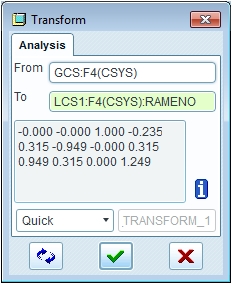
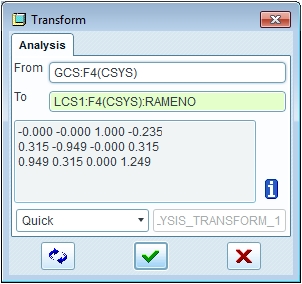
Směry jednotkových vektorů na osách posledního ss (LCS1)
Vyčíslení směrů jednotlových vektorů na osách LCS1 v čase 0 (místo 0 lze zadat čas v rozsahu nastavené proměnné času)
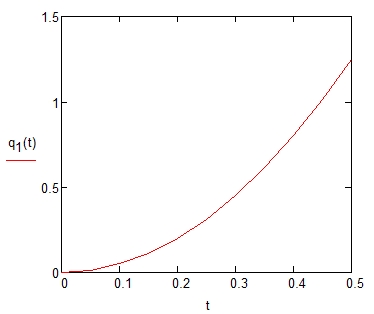
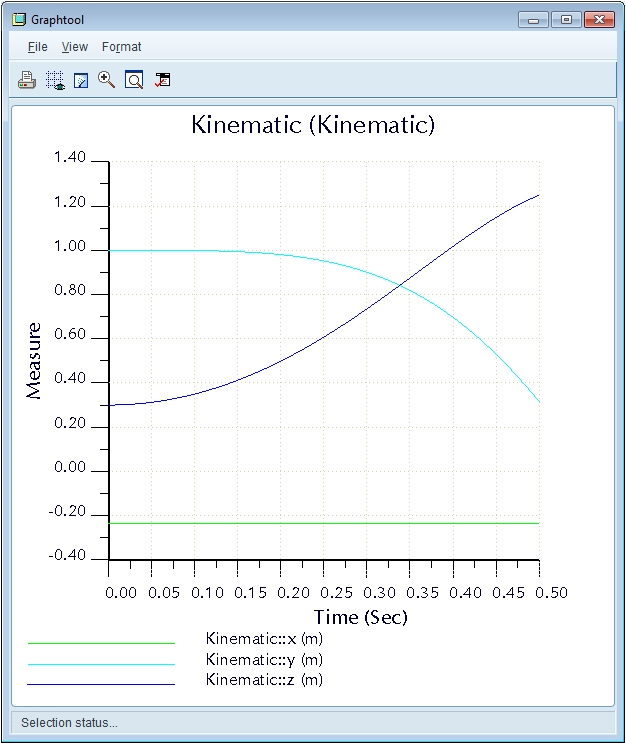
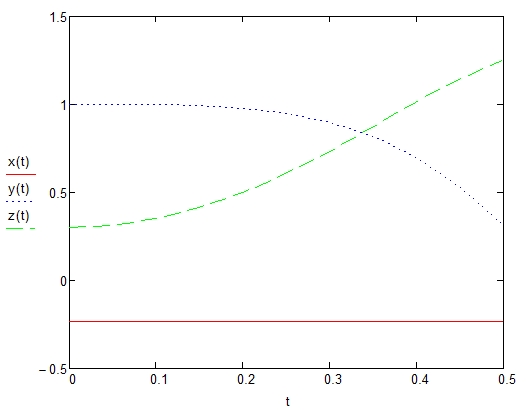
Průběh polohy koncového bodu